
สะพานจงทังบนทางหลวง xx มีช่วงหลัก 32.5 + 4 × 45 + 32.5 ม. และคานกล่องต่อเนื่องคอนกรีตเสริมเหล็กอัดแรงหน้าตัดเท่ากัน (วิธีหลังแรงดึง) โดยมีความยาวรวม 245.9 ม. คานกล่องเป็นห้องเดี่ยว ความสูงของคานตรงกลางคือ 308.25 ซม. ความกว้างของหลังคาคือ 1100 ซม. (ความกว้างของดาดฟ้าสะพานคือ 12 ม.) และความกว้างของแผ่นด้านล่างคือ 480 ซม. ใยมีความเอียง และระยะตรงกลางของแผ่นด้านบนคือ 570ซม. ปลายลำแสงและตรงกลางของลำแสงทั้งหมดมีคาน และส่วนที่เหลือจะมีไดอะแฟรมทุกๆ 15 เมตร
ฐานเสาของสะพานหลักเป็นเสาเข็มหล่อแบบเจาะ 4 เสา ขนาดเส้นผ่านศูนย์กลาง 120 ซม. ซึ่งฝังอยู่ในฐานหินยาวกว่า 50 ซม. ตัวท่าเรือใช้โครงสร้างคอนกรีตเสริมเหล็กสองเสาที่มีเส้นผ่านศูนย์กลาง 180 ซม.
เมื่อสร้างสะพานแล้วจะใช้วิธีการ SSY นั่นคือใช้วิธีการกดแบบหลายจุดเพื่อสร้างลำแสง ลักษณะของวิธีการนี้คือ: แรงปฏิกิริยาแนวนอนเมื่อกด (ดึง) ตัวลำแสงจะกระจายและกระทำต่อแต่ละเสา และสามารถควบคุมการดำเนินการผลัก (ดึง) จากส่วนกลางได้ เนื่องจากไม่มีสะพานชั่วคราวระหว่างการทำงาน ส่วนหน้าของคานกล่องจึงเชื่อมต่อกับโครงเหล็กประดิษฐ์ยาว 30 เมตรเป็นคานนำทาง
เมื่อคานกล่องสำเร็จรูปถูกดันขึ้น จะดำเนินการเป็นรอบตามขั้นตอนการเคลื่อนตัว→คานยก→คานปล่อย→แรงขับ รูปที่ 1 แสดงกรณีของวงจร
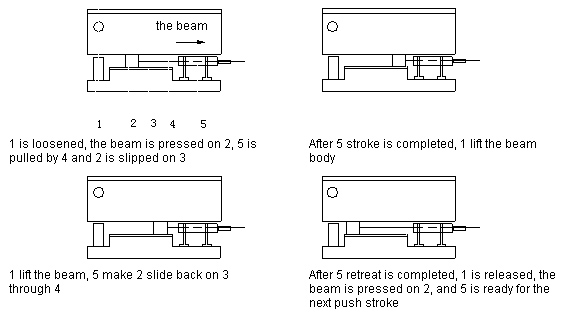
แผนผังของขั้นตอนการวิดพื้น
1 —— กระบอกแนวตั้ง-2——ลากหัว-3——สทางลาด-4——ปดึงร็อด-5——ฮกระบอกสูบแนวนอน
จะเห็นได้ว่าเพื่อให้ทราบถึงวัฏจักรของโปรแกรมนี้ กระบอกแนวนอนจะทำหน้าที่ผลักคานกล่องผ่านอุปกรณ์เลื่อนให้เสร็จสิ้น และกระบอกแนวตั้งจะทำหน้าที่ยกและวางลำแสงให้เสร็จสิ้น นั่นคือกระบอกแนวนอนและกระบอกแนวตั้งจะทำหน้าที่สลับกัน

1. ระบบไฮดรอลิกของคานดันหลายจุดและการควบคุม
ทั้งกระบอกสูบแนวนอนและกระบอกสูบแนวตั้งขับเคลื่อนและควบคุมด้วยระบบไฮดรอลิกด้วยไฟฟ้า ความยาวรวมของคานกล่องที่จะผลักสำหรับสะพานคือ 225 ม. และมิเตอร์เชิงเส้นแต่ละอันมีน้ำหนัก 16.8 ตัน โดยมีน้ำหนักรวมประมาณ 3,770 ตัน ดังนั้นจึงมีการจัดเรียงกระบอกสูบแนวนอน 10 กระบอกและกระบอกสูบแนวตั้ง 24 กระบอก (แรงดันน้ำมัน 320 กก./ซม.2 และเอาต์พุตคือ 250 ตัน) มีเสาทรงกระบอกแนวนอนจำนวน 5 เสา แต่ละเสามี 2 เสา มี 6 ท่าสำหรับกระบอกแนวตั้ง 4 ท่าสำหรับแต่ละท่า
แม่แรงแนวตั้งช่วยยกและลดคานให้เสร็จสมบูรณ์ ในกระบวนการก่อสร้าง ไม่จำเป็นต้องซิงโครไนซ์สะพานทั้งหมด และต้องแบ่งเสา ดังนั้นจึงไม่มีปัญหาในการควบคุมแบบรวมศูนย์ การควบคุมด้วยไฟฟ้าสามารถยกแม่แรงขึ้นหรือลงได้อย่างต่อเนื่อง และยังสามารถดำเนินการเขย่าเบา ๆ ได้อีกด้วย
แจ็คแนวนอนทำให้การผลักลำแสงเสร็จสมบูรณ์ กระบวนการก่อสร้างต้องการให้ทั้งสะพานเป็นแบบซิงโครนัส กล่าวคือ ส่งออกหรือหยุดในเวลาเดียวกัน จึงมีการตั้งค่าการควบคุมแจ็คแนวนอนแบบรวมศูนย์ และกล่องไฟฟ้าควบคุมแบบรวมศูนย์ได้รับการตั้งค่าเพื่อจุดประสงค์นี้
การใช้แม่แรงแนวนอนและแม่แรงแนวตั้งค่อยๆ เพิ่มขึ้น และคานกล่องถูกประกอบไว้ล่วงหน้า 15 เมตรต่อรอบ ด้วยการเติบโตอย่างต่อเนื่องของคานกล่อง จำนวนแม่แรงที่ใช้จึงค่อยๆ เพิ่มขึ้น ในสองสามรอบสุดท้ายของการผลิตชิ้นส่วนสำเร็จรูป มีการใช้แม่แรงแนวนอน 10 ชุดและแม่แรงแนวตั้ง 24 ชุดทั้งหมด
เพื่อเชื่อมต่อแต่ละท่าเรือเข้ากับห้องควบคุมส่วนกลาง เราได้ติดตั้งระบบส่งสัญญาณเสียงอินเตอร์คอม การปฏิบัติได้พิสูจน์แล้วว่าระบบส่งกำลังไฮดรอลิกและวิธีการควบคุมที่ระบุไว้ข้างต้นมีความน่าเชื่อถือในการใช้งาน
เรามาพูดถึงประสบการณ์ของปัญหาหลายประการเกี่ยวกับการส่งผ่านไฮดรอลิกของวิธีคานผลักเฟรมเพื่อใช้อ้างอิง
1. ปัญหาการควบคุมแรงดันตามระดับของระบบไฮดรอลิก ปัญหาของการควบคุมแรงดันทีละขั้นตอนถูกหยิบยกขึ้นมาเนื่องจากการพิจารณาความต้านทานแรงเสียดทานสถิตและความต้านทานแรงเสียดทานแบบไดนามิกที่แตกต่างกันเมื่อคานกล่องเคลื่อนที่ ในอดีตเชื่อกันมาตลอดว่าระบบไฮดรอลิกควรมีแรงดันน้ำมันสองหรือสามแรงดัน: เมื่อเอาชนะความต้านทานแรงเสียดทานสถิตได้ แรงดันน้ำมันก็จะเพิ่มมากขึ้น และใช้แรงดันน้ำมันน้อยลงเมื่อคานกล่องเลื่อน วิธีการคือเปลี่ยนระบบไฮดรอลิกโดยเชื่อมต่อรีลีฟวาล์วต่างๆ ที่ตั้งค่าไว้ ด้วยวิธีนี้ระบบไฮดรอลิกและการควบคุมจึงซับซ้อนกว่าเล็กน้อย การปฏิบัติของเราได้พิสูจน์แล้วว่าแรงดันน้ำมันของระบบไฮดรอลิกไม่ได้ขึ้นอยู่กับตัวมันเอง แต่ขึ้นอยู่กับความต้านทานภายนอกของแม่แรง กล่าวคือ เมื่อระบบไฮดรอลิกทำงาน แรงดันน้ำมันไม่ได้ถูกกำหนดโดยปริมาณบนป้ายชื่อปั๊มน้ำมัน แต่โดยความต้านทานรวมที่พบระหว่างการไหลของน้ำมันกลับสู่ถังน้ำมันหลังจากออกจากปั๊ม . หากแม่แรงไม่มีความต้านทาน (โหลด) แรงดันของปั้มน้ำมันจะถูกกำหนดโดยความต้านทานของท่อเท่านั้น หากน้ำมันจากปั้มน้ำมันเข้าสู่บรรยากาศหรือถังน้ำมันทันที แรงดันของปั้มน้ำมันจะเป็นศูนย์ หากความต้านทาน (โหลด) R ของแม่แรงเพิ่มขึ้น แรงดันของปั้มน้ำมันก็เพิ่มขึ้นเช่นกัน เมื่อแม่แรงขนถ่ายออก แรงดันของปั้มน้ำมันจะถูกกำหนดโดยวาล์วทางเดียว เมื่อแม่แรงถูกโหลด แรงดันของปั้มน้ำมันซึ่งก็คือแรงดันน้ำมันของระบบจะถูกกำหนดโดยความต้านทานของแม่แรง แรงดันน้ำมันในที่ทำงานถูกกำหนดโดยแรงของแม่แรง กล่าวคือ แรงดันน้ำมันของระบบไฮดรอลิกจะเปลี่ยนตัวเองตามความต้านทานภายนอก ดังนั้นจึงไม่จำเป็นต้องควบคุมแรงดันทีละขั้นตอน

2. ปัญหาการซิงค์ของแจ็คแนวนอน ขั้นตอนการดันต้องใช้แม่แรงแนวนอนด้านซ้ายและขวาดันลำแสงไปข้างหน้าด้วยความเร็วเท่ากัน มิฉะนั้นลำแสงจะเบี่ยงเบนไปเมื่อลื่นไถล แน่นอน สิ่งแรกที่ผู้คนพิจารณาคือแรงที่ใช้โดยแจ็คแนวนอนด้านซ้ายและขวากับตัวลำแสงควรจะเท่ากัน ซึ่งถูกต้อง เมื่อความสมมาตรด้านซ้ายและขวาของตัวลำแสงดีเยี่ยม และความต้านทานเท่ากับซ้ายและขวา แน่นอนว่าแรงที่ใช้โดยแจ็คแนวนอนด้านซ้ายและขวาก็ควรจะเท่ากันเช่นกัน ข้อพิจารณาประการที่สองคือความเร็วไปข้างหน้าซ้ายและขวาควรเท่ากันด้วย ด้วยวิธีนี้ลำแสงจึงสามารถวิ่งได้อย่างราบรื่นและตรง อย่างไรก็ตาม เป็นเรื่องยากสำหรับตัวลำแสงเพื่อให้แน่ใจว่าแต่ละส่วนจะต้องสมมาตรกันอย่างสมบูรณ์แบบในด้านซ้ายและขวา และความต้านทานด้านซ้ายและขวาจะต้องเท่ากัน แรงดันน้ำมันที่เกี่ยวข้องกับระบบที่กล่าวข้างต้นถูกกำหนดโดยความต้านทานภายนอก ลองจินตนาการดูว่าแจ็คซ้ายและขวาจะต้องทำงานภายใต้สภาวะแรงดันน้ำมันที่แตกต่างกัน ดังนั้นความเร็วของแจ็คซ้ายและขวาจะซิงโครไนซ์ในเวลานี้หรือไม่ เพื่อประโยชน์ในการอธิบาย สันนิษฐานว่ามีแม่แรงเพียงคู่เดียวในท่าเรือเดียวเท่านั้นที่ใช้งานได้ เนื่องจากเราตั้งค่าปั๊มหนึ่งตัวด้วยแจ็คเดียว จึงช่วยแก้ปัญหาการซิงโครไนซ์ความเร็วได้เป็นอย่างดี เนื่องจากปั๊มน้ำมันที่เราใช้นั้นเป็นปั๊มดิสเพลสเมนต์เชิงบวกเชิงปริมาณ ตามทฤษฎี ไม่ว่าปั๊มน้ำมันจะพบกับความต้านทานเท่าใด (นั่นคือ ไม่ว่าแรงดันน้ำมันของระบบจะสูงแค่ไหนก็ตาม) อัตราการไหลของมันก็คือ ไม่เปลี่ยนแปลง ดังนั้นแจ็คซ้ายและขวาจะต้องซิงโครไนซ์กัน แน่นอนว่า ข้อสรุปนี้สามารถอนุมานได้จากสถานการณ์ของท่าเรือสองแห่งที่มีสี่ยอดแหลม สามท่าเรือที่มีหกยอดแหลม สี่ท่าเรือที่มียอดแปดยอด หรือห้าท่าเรือที่มียอดสิบยอด ดังนั้นวิธีการของเราในการใช้ปั๊มตัวเดียวและตัวบนสามารถตระหนักถึงปัญหาการซิงโครไนซ์ด้านซ้ายและขวาได้ดีขึ้น การปฏิบัติยังพิสูจน์ให้เห็นว่าในคานผลัก เส้นกึ่งกลางของคานกล่องโดยพื้นฐานแล้วไม่ได้ออฟเซ็ต (พูดอย่างเคร่งครัด มันควรจะออฟเซ็ตจากซ้ายไปขวาเล็กน้อย แต่สามารถรักษาไว้ภายในช่วงที่กำหนดได้เสมอ) ขั้นตอนการก่อสร้างต้องมีการตรวจสอบความเบี่ยงเบนของเส้นกึ่งกลางอย่างใกล้ชิด หากเกิน 2 ซม. จะต้องได้รับการแก้ไข (โดยมีคำแนะนำด้านข้าง) ในระหว่างกระบวนการดันขึ้น จำนวนการแก้ไขมีน้อยมาก เพียงหนึ่งหรือสองครั้งในการผลักสามสิบครั้ง (คานกล่อง 15 ม.) ซึ่งถือได้ว่าเป็นผลรวมของปัจจัยวัตถุประสงค์หลายประการ เนื่องจากในส่วนของเครื่องจักรไฮดรอลิก ปั๊มน้ำมันมีข้อผิดพลาดในการไหล แม่แรงมีปัญหาการรั่วไหลภายใน (แม่แรงแต่ละตัวแตกต่างกัน และลูกสูบอาจอยู่ในตำแหน่งที่แตกต่างกัน ) และระบบรั่วของอุปกรณ์อื่นๆ ภายใน ฯลฯ ซึ่งไม่ขัดแย้งกับข้อสรุปของเราข้างต้น
3. ปัญหาการซิงค์ของแจ็คแนวตั้ง แม่แรงแนวตั้งของเราทำงานโดยใช้ปั๊มที่มีแม่แรงสี่ตัว และควรติดตั้งวาล์วซิงโครไนซ์ เนื่องจากวาล์วซิงโครไนซ์ (หรือวาล์วเปลี่ยนทิศทาง) สามารถสร้างแม่แรงหลายตัวภายใต้โหลดที่แตกต่างกัน (ความต้านทาน) ยังคงได้รับอัตราส่วนที่กำหนดไว้ล่วงหน้าหรือการจ่ายน้ำมันที่เท่ากันเพื่อให้บรรลุ การซิงโครไนซ์ แต่เมื่อพิจารณาว่าวาล์วซิงโครไนซ์มีเพียงสองช่องเท่านั้น เพื่อลดความซับซ้อนของโครงสร้างระบบ จึงไม่มีการติดตั้งวาล์วซิงโครไนซ์ เมื่อพิจารณาว่าน้ำหนักซ้ายและขวาของคานกล่องมีความสมมาตร จึงไม่ใช่ปัญหาใหญ่ในการทำเช่นนั้น การปฏิบัติได้พิสูจน์แล้วว่าการประมาณการนั้นถูกต้อง โดยพื้นฐานแล้วแจ็คแนวตั้งจะขึ้นและลงพร้อมกัน และไม่มีปัญหาในการยกและล้มของลำแสง
เวลาโพสต์: May-16-2022